



Catégorie
- Clapet de pied d'urgence
- Bras de chargement
- Bras de chargement supérieur
- Bras de chargement inférieur
- Pièces de bras de chargement
- Échelle pliante
- Composants de camion-citerne
- Couverture de trou d'homme
- API d'adaptateur
- Soupape de récupération de vapeur
- Accessoires pour camions-citernes
- Pompe et distributeur de GPL
- Pompe GPL
- Composants du distributeur de GPL
- Pompe et débitmètre
- Pompe à carburant
Produits recommandés






4086 bras de Robot de bureau 20*20cm Mini empreinte de Robot chargement et déchargement de petites pièces avec bras de Robot de l'industrie 3c
Taille de l'emballage par produit unitaire 106,00 cm * 50,00 cm * 103,00 cm Poids brut par produit unitaire 50,000 kg B
Informations de base
| Modèle NON. | ZKBOT-4086 |
| Service après-vente | 1 an |
| garantie | 1 an |
| Mode de contrôle | Contrôle point à point |
| Mode conduite | Électrique |
| Application | Soudage, chargement, forgeage |
| Condition | Nouveau |
| Certificat | CE |
| Charge utile | 3kgs |
| Répéter la précision de la position | 0,1 mm |
| Portée maximale | 700 millimètres |
| Tension de travail | AC220V/110V |
| Consommation d'énergie | 100W |
| Conduire | Servomoteur Hybird + engrenage oblique de haute précision |
| E/S | 10 entrées, 8 sorties (une pour le défaut de l'armoire de commande |
| Forfait transport | Boîte en carton |
| spécification | 180*180mm 0.2CBM |
| Marque déposée | SAVON |
| Origine | Chine |
| Code SH | 8479501900 |
| Capacité de production | 1000 pièces/ans |
Emballage et livraison
Taille de l'emballage par produit unitaire 106.00cm * 50.00cm * 103.00cm Poids brut par produit unitaire 50.000kgDescription du produit
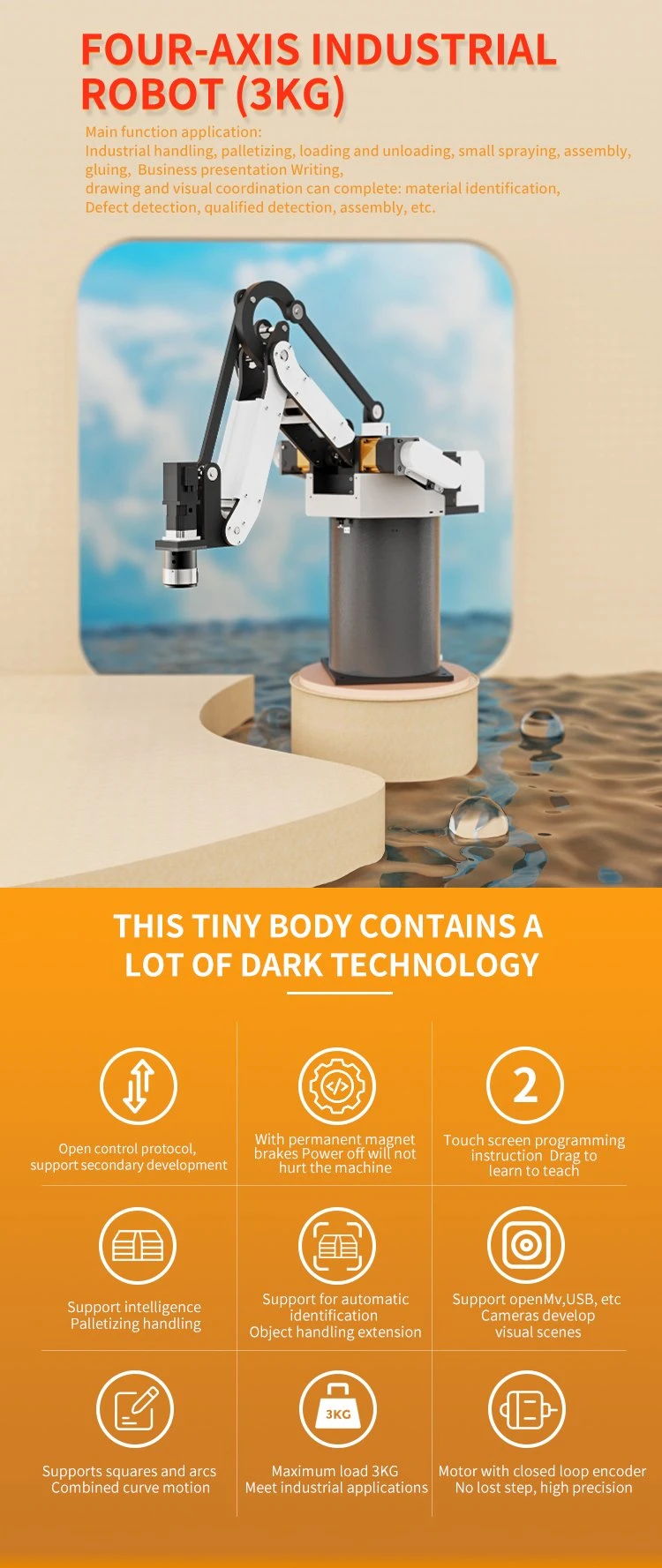
Bras mécanique industrielSystème de solution de tri visuel intelligent AI ARTICLE NO. ZKBOT-4086
notre bras mécanique industrielApplication principale de la fonction : Manutention industrielle, palettisation, chargement et déchargement, assemblage, collage, présentation commerciale La rédaction, le dessin et la coordination visuelle peuvent compléter : identification du matériau, détection des défauts, détection qualifiée, assemblage, etc.

Q1 : pouvez-vous définir le cycle de travail ? A1 : l'écran tactile peut prendre en charge le cycle de nœud de mouvement dans les 50 étapes, et le PC peut prendre en charge un cycle d'étape illimité. Q2 : Existe-t-il une fonction pour enregistrer automatiquement les points d'enseignement lorsque l'alimentation est coupée ? A2 : Oui.
Q3 : Le robot peut-il être open source ? R3 : Pas complètement open source, la couche inférieure fournit le protocole de communication de contrôle du manipulateur, prend en charge le développement secondaire de périphériques et de fonctions supplémentaires, et interagit avec des périphériques externes, en ligne.
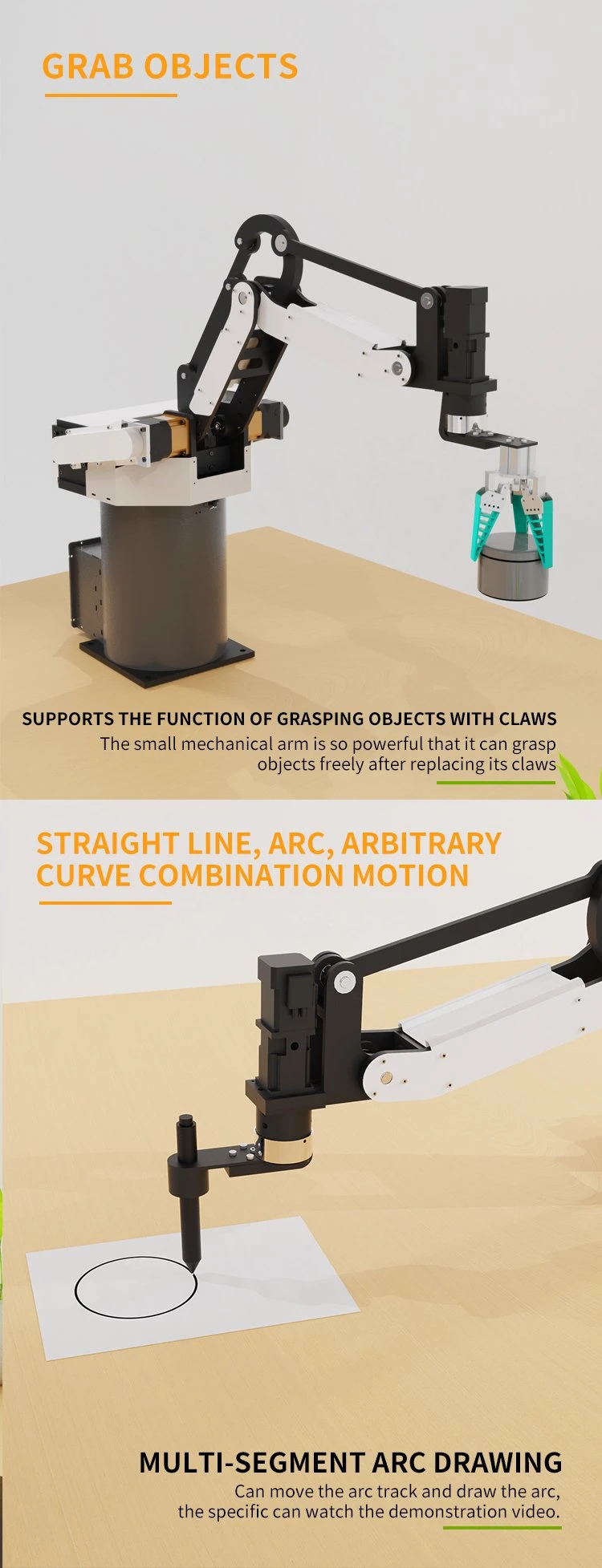
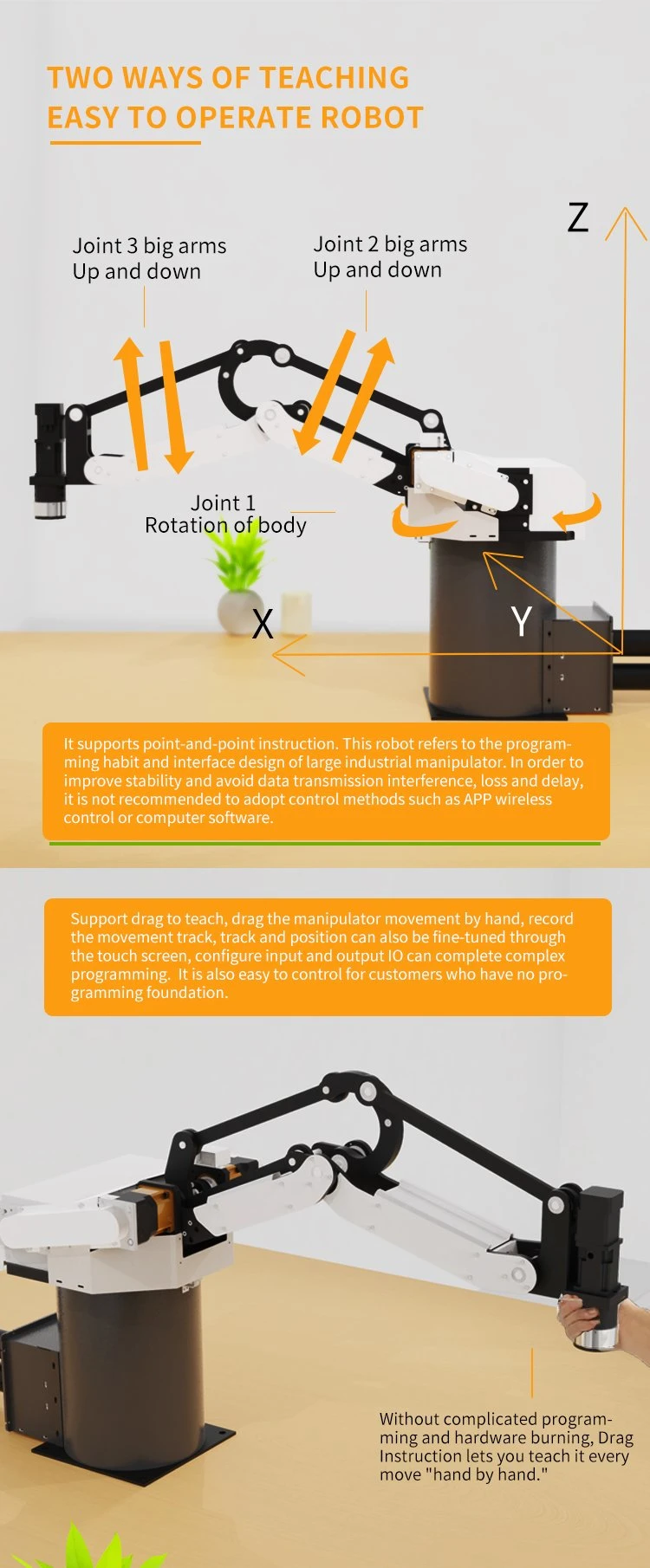
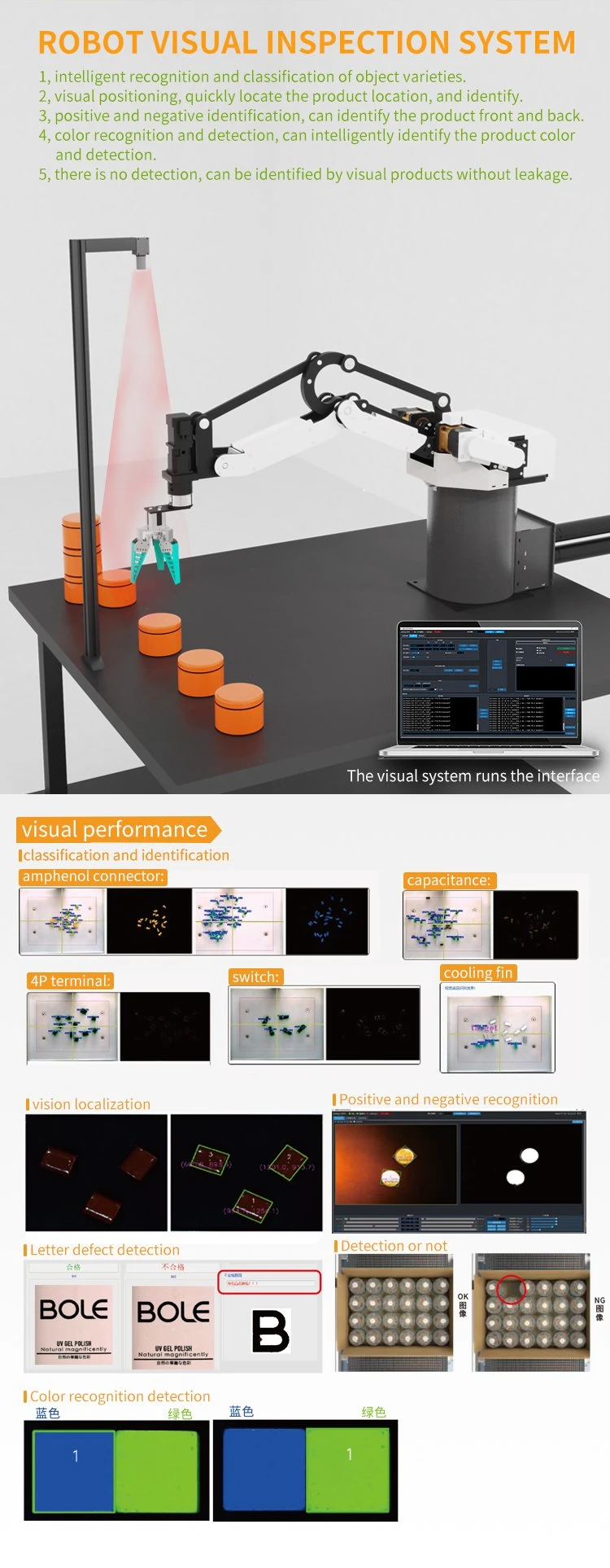
Protocole de contrôle ouvert, prise en charge du développement secondaire. bras de robot servo, protocole de communication de port série de contrôle de mouvement ouvert à fond ouvert, le développement secondaire de l'équipement utilisateur du bras de robot est facile à utiliser, qui peut être utilisé dans la manutention industrielle, la palettisation, le chargement et le déchargement, la petite pulvérisation, peut prendre en charge point à point, point à ligne, ligne à ligne, arc, sortie DO, entrée DI, y compris les coordonnées mondiales, c'est-à-dire tout droit vers le haut et vers le bas. Le protocole de contrôle peut également prendre en charge openMv, USB et d'autres caméras pour développer des scènes visuelles, une interaction visuelle, identifier la taille de l'objet et la position de l'objet et le transporter (nécessité de développer leur propre ordinateur supérieur), ainsi que des équipements externes en ligne, peuvent être utilisés pour la petite production industrielle. Ce bras de robot est également équipé d'un dispositif d'instruction de fonctionnement, facile à utiliser et rapide à démarrer. Le dispositif d'instruction prend en charge l'instruction manuelle et l'instruction de glissement. Prend en charge trois formulations utilisateur et trois programmes indépendants, chaque programme 50 points programmables, la charge maximale du manipulateur jusqu'à 3 kg. Fonctions de manipulation : prend en charge une pompe à air de 3 kg pour absorber des objets. Le petit bras robotique est si puissant qu'il peut facilement absorber des objets jusqu'à 3 kg. Saisissez des objets : prend en charge la fonction de saisir des objets avec des griffes. Le petit bras mécanique est si puissant qu'il peut saisir des objets librement après avoir remplacé ses griffes. Deux façons d'enseigner Robot facile à utiliser : 3 gros bras articulés vers le haut et vers le bas. Articulation 2 gros bras Haut et bas. Articulation 1 Rotation du corps. Il prend en charge les instructions point par point. Ce robot fait référence à l'habitude de programmation et à la conception d'interface d'un grand manipulateur industriel. Afin d'améliorer la stabilité et d'éviter les interférences, les pertes et les retards de transmission de données, il n'est pas recommandé d'adopter des méthodes de contrôle telles que le contrôle sans fil APP ou un logiciel informatique. Prise en charge de la traînée pour enseigner, faites glisser le mouvement du manipulateur à la main, enregistrez la piste de mouvement, la piste et la position peuvent également être ajustées via l'écran tactile, configurez l'entrée et la sortie IO peut compléter une programmation complexe. Il est également facile à contrôler pour les clients qui n'ont aucune base en programmation. Sans programmation compliquée ni gravure matérielle, Drag Instruction vous permet de lui apprendre chaque mouvement "main par main". système d'inspection visuelle du robot : 1, reconnaissance intelligente et classification des variétés d'objets. 2, positionnement visuel, localiser rapidement l'emplacement du produit et l'identifier. 3, identification positive et négative, peut identifier le produit avant et arrière. 4, reconnaissance et détection des couleurs, peut identifier intelligemment la couleur et la détection du produit. 5, il n'y a pas de détection, peut être identifié par des produits visuels sans fuite. performance visuelle : classification et identification.connecteur amphenol : .capacitance : borne 4P : interrupteur : ailette de refroidissement : localisation de la vision, reconnaissance positive et négative, détection de défaut de lettre, détection ou non, détection de reconnaissance de couleur. 2, corps en alliage d'aluminium + pièces mobiles de processus à haute résistance, pour répondre au travail continu industriel de 24 heures. 3, moteur d'encodeur en boucle fermée, haute précision de palettisation. Prise en charge du contrôle des E/S et du travail en ligne multi-machines avec la ligne de production : entrée et sortie IO 6, prise en charge du robot de contrôle de déclenchement d'entrée IO de signal externe, ou des signaux de sortie IO de robot déclenchent le contrôle des périphériques externes. Opération de huit instructions de travail et coordonnées précises, paramètres de vitesse, etc. Boîte de sélection du jeu d'instructions, qui devient jaune lorsqu'elle est cochée. L'instruction de point est de parcourir le point, l'arc est de dessiner un arc, et la ligne droite et le décalage de la ligne droite doivent marcher sur la ligne droite (la première est la position absolue - opposée, la seconde est la position relative). DI/DO est la sortie d'entrée et de sortie IO (chacune a 6 interfaces). Chaque position de coordonnée de pas et état de vitesse sont affichés en temps réel. Stockez un maximum de 50 points d'enseignement. Trois formulations sont prises en charge. Un total de 3 formules de fonctionnement peuvent être prises en charge. Chaque formule prend en charge 50 étapes. Dans l'état de commande Interface de réglage des paramètres : Commutation du système de coordonnées, Coordonnées mondiales (liaison à trois axes) Coordonnées des articulations (action uniaxiale) Coordonnées en temps réel Angle du manipulateur actuel (coordonnées des articulations) Les coordonnées mondiales actuelles du manipulateur, Le mm pour l'engrenage Voir l'affichage de sélection d'engrenage. sont pris en charge, chaque formule prenant en charge 50 étapes. Sélection du jeu d'instructions : point, arc, ligne, décalage de ligne DI, DO. Les coordonnées cibles. Selon la conception du robot industriel. Les instructions fonctionnelles du manipulateur sont les suivantes : instruction du protocole d'étalonnage zéro du bras robotique instruction du protocole d'arrêt du bras robotique instruction du protocole du châssis de contrôle du manipulateur instruction du protocole du moteur du bras de commande du manipulateur instruction du protocole du moteur du bras de commande du manipulateur Directives du protocole DIDO Instructions du protocole de la poignée de contrôle Instructions du protocole de la pompe à air de contrôle Protocole de communication du port série de contrôle mécanique. La plage d'extension est de 910,80 mm. Vue latérale de la portée des travaux. Dimensions des trous de montage d'extrémité. Vue de dessus de la portée des travaux. Paramètres : élément d'image : 500 W. Précision d'identification : ± 0,1 mm. Plage d'orientation : ± 1 mm. Gamme d'identification : Ajustable selon la demande.Application : Utilisé pour la séparation, la manutention et la palettisation d'objets courants. Ne convient pas à la détection de petits objets irréguliers et à une précision de positionnement élevée. La caméra prend temporairement en charge l'utilisation de notre protocole de bras de robot. .Vitesse d'exécution : (la vitesse moyenne de capture d'un seul objet est d'environ 6 s lorsqu'elle n'est pas mesurée pour la trajectoire optimale).